18级毕业生们的优秀毕业设计云展来啦!
相信大家一定都很期待
那就让我们来一饱眼福吧~
1.作品名称:智能自动分类垃圾箱算法设计及其嵌入式实现
作者:胡金鑫
指导教师:邵倩倩
作品介绍:本设计基于语音识别的智能垃圾分类控制系统设计要求实现对使用者发出的语音指令完成识别、垃圾桶自动开盖、语音播报垃圾种类、垃圾桶延迟数秒后自动关盖的功能。能够帮助用户方便快捷地识别垃圾种类并投入到对应的垃圾桶内,垃圾桶能够实现自动开关盖可以避免用户和垃圾桶直接接触干净卫生。
2.作品名称:多自主移动机器人编队队形控制算法的设计与实现
作者:尹政
指导教师:王清珍
作品介绍:机器人在独立工作中已具备较强的执行能力,但对于一些复杂的、可分解的或者是需要追求效率的任务来说,多机器人编队系统才是更好的解决方案。让多机器人在互相通信、协同合作的情况下执行任务能大大提高工作效率加快工作进度,因此多机器人编队系统具有广泛的研究价值。根据当前实验需要,针对多自主移动机器人编队系统的仿真设计问题展开了研究和分析,其主要内容是采用领导跟随者策略和人工势场法的核心思想,对多机器人系统的编队及移动方式进行了新的规划和设计。根据多机器人编队系统的实效性、协调性以及整体性要求,通过MATLAB中的RTB(Robotics Toolbox)工具箱搭建起一个多机器人编队仿真实验平台。实验过程首先将实验内容拆分,然后分模块进行设计和实现。为保证系统内部各个机器人之间的关联性,系统采用局域网通信作为编队、变队、行进等过程中的一系列指令与信息互传的方式。
核心设计截图:

图1 鱼群结伴而游
图2 无人机编队

图3 自动分拣机器人群
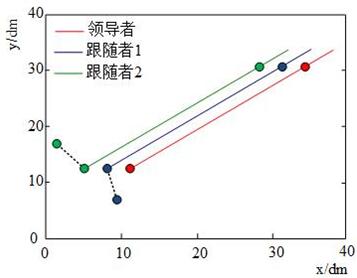
图4 横线形队型编队与行进
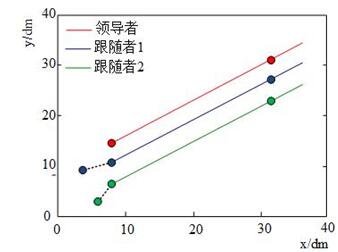
图5 纵线形队型编队与行进
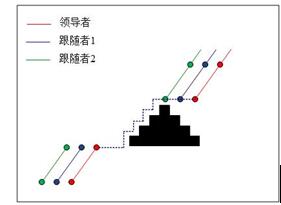
图6 横线形队型编队避障过程
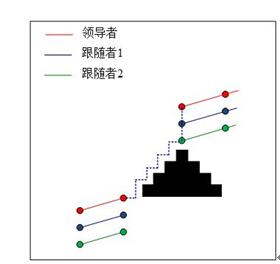
图7 纵线形队型编队避障过程
3.作品名称:种植大棚智能控制系统的设计与实现作者:韩琪指导教师:杨丽作品介绍:本设计是一个种植大棚智能控制系统,可以用于农业蔬菜种植。在使用时是通过传感器来检测对大棚内的环境参数进行检测,检测的数据被数据核心控制单元所采纳。将数据的进行解析和分析,再根据设定的阈值检测参数进行控制或通过外界控制接口进行控制基本设备,从而达到智能种植的功能。
4. 作品名称:智能仓储搬运机器人系统的设计与实现
作者:李江浩
指导教师:屈海朋
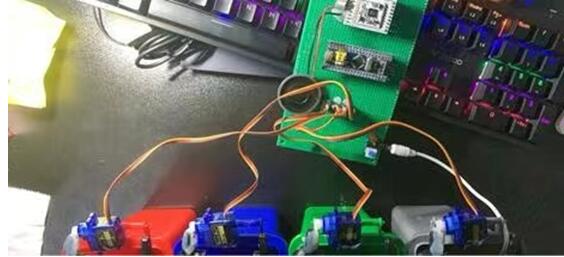
作品介绍:随着全球经济贸易的深度融合,物流与仓储发挥着日益重要的作用,仓储智能化和无人仓储逐渐被更多企业接受并使用。然而,面对大规模的智能仓储的现实需求,传统的搬运机器人已无法满足。设计并实现了一种具有移动抓取、自主导航、交互控制的多功能智能仓储搬运机器人:构建自主可控的硬件系统,基于通用计算机设计并实现高可靠、高稳定的算法系统及相关仿真,为扩展智能仓储搬运机器人的功能,设计了以语音交互、基于Qt的本地交互和基于Web的在线交互为一体的人机交互系统,简化机器人的操作和使用,最终使得移动机器人能够准确的进行建图导航、抓取规划移动作业功能。实物照片:

控制板与驱动板实物图
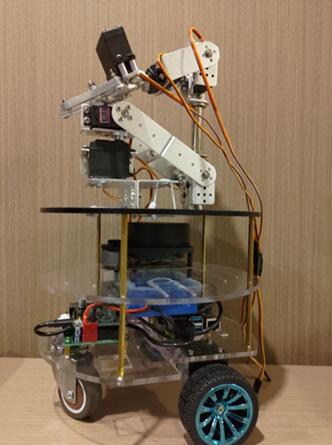
机器人实物图
(文案|大数据与人工智能学院 图片|大数据与人工智能学院)